Robot Enthusiast
Hello, this is my Portfolio
Interests
- Computer Vision
- Simultaneous Localization and Mapping
- Classical Controls
- Deep Learning
Education
-
MS in Robotics Engineering, 2024
Worcester Polytechnic Institute, Worceter, Massachusetts.
-
B.Tech in Electronics and Communication Engineering, 2022
Visvesvaraya National Institute of Technology, Nagpur, India
Experience
Research Intern (Computer Vision and Deep Learning)
Nokia Bell Labs
- Collaborating with a team of researchers to create a Semantic 3D map reconstruction using Nueral Randiance Field (NeRF).
Summer Research Intern
Technische Universität Hamburg (TUHH)
- Worked with the HULK (Humanoid Robot Team) of TUHH under teh guidance of Prof. Herbert Werner.
- Worked on trajectory generation and optimization of walking for humaoid robot.
- Implemented computer vision algorithms for edge detection and horizon detection on images as well as videos taken by the humanoid robot, which further performed object detection and tracking using various ML algorithms.

Lab Member, Treasurer
- Worked on various research project under the gudiance of Dr. Shittal Chiddawar, namely
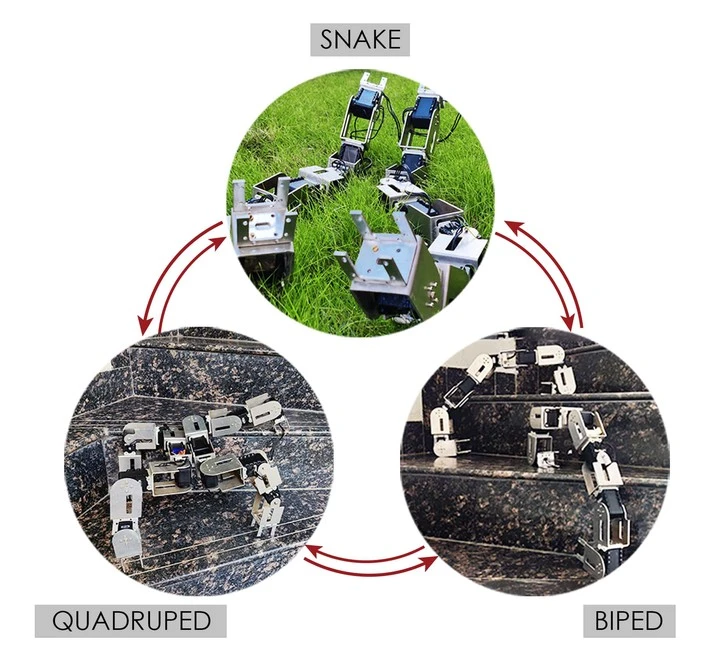
- Reconfigurable Quadrupedal Bipedal Snake Robot (ReQuBiS)
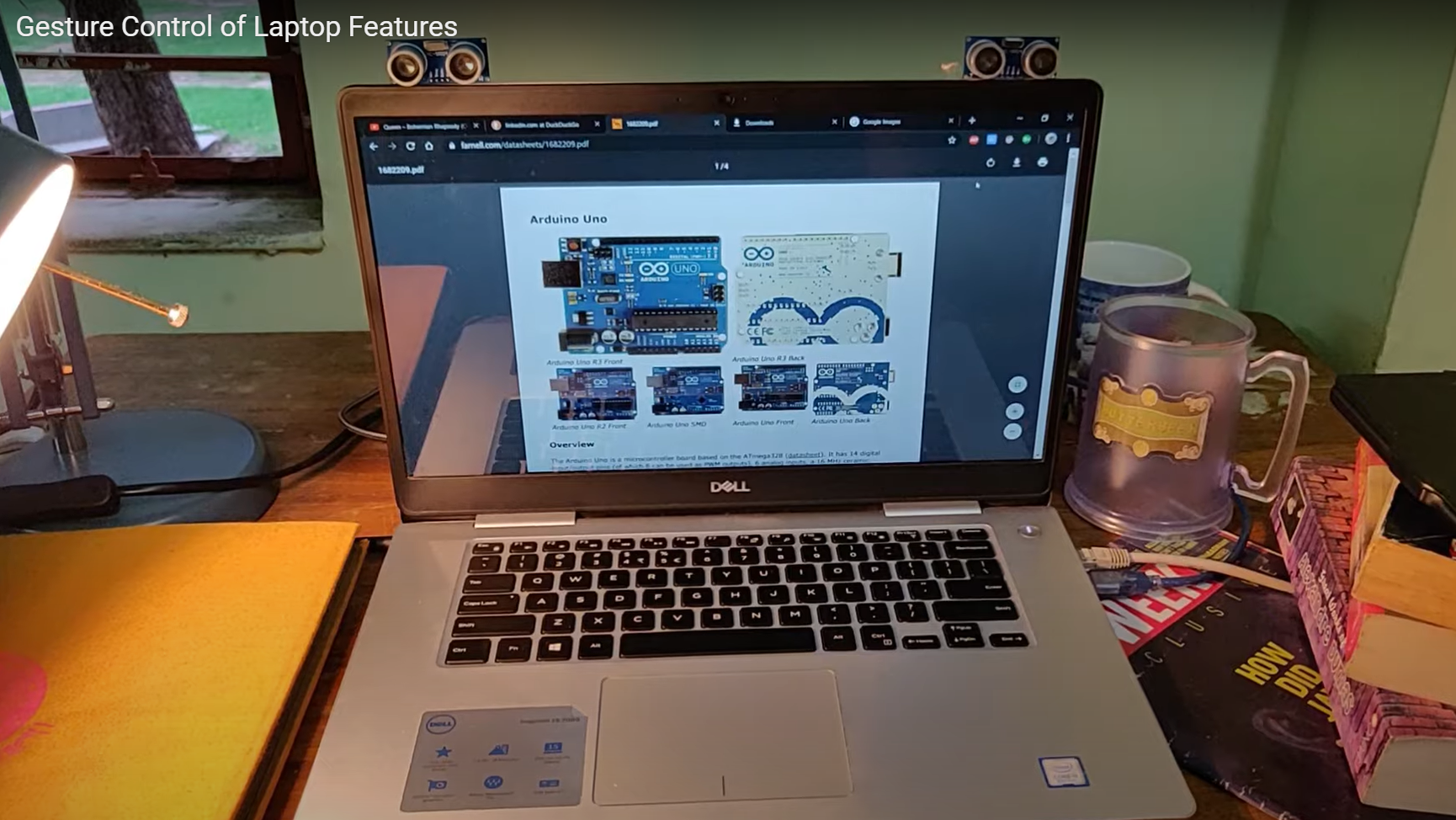
- Hand Gesture Control of Computer Features
- The position help me build skills like teamwork, communication, research and financial management for the lab.
Skills
LaTeX
Python
C++
linux
pyTorch
ROS
Matlab
Docker
OpenCV
Coursework
RBE502 Robot Control
CS549:Reinforcement Learning
CS541:Deep Learning
RBE550:Motion Planning
Projects
Developed reconfigurable robotics snake with the ability to configure them into a quadruped and bipedal structure.
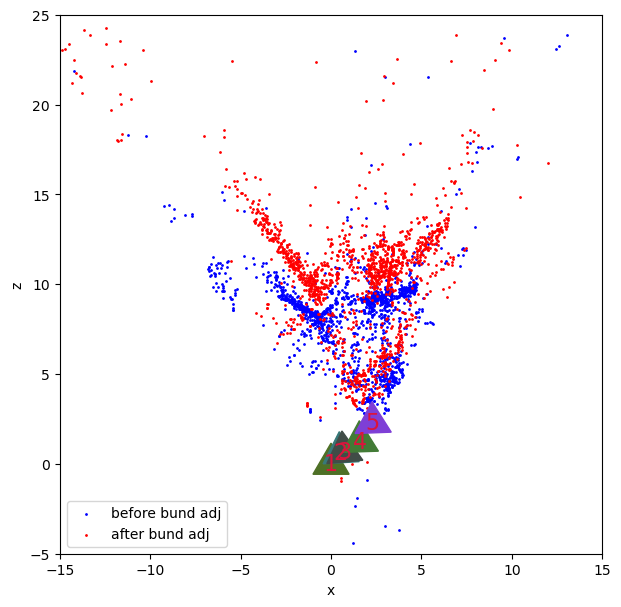
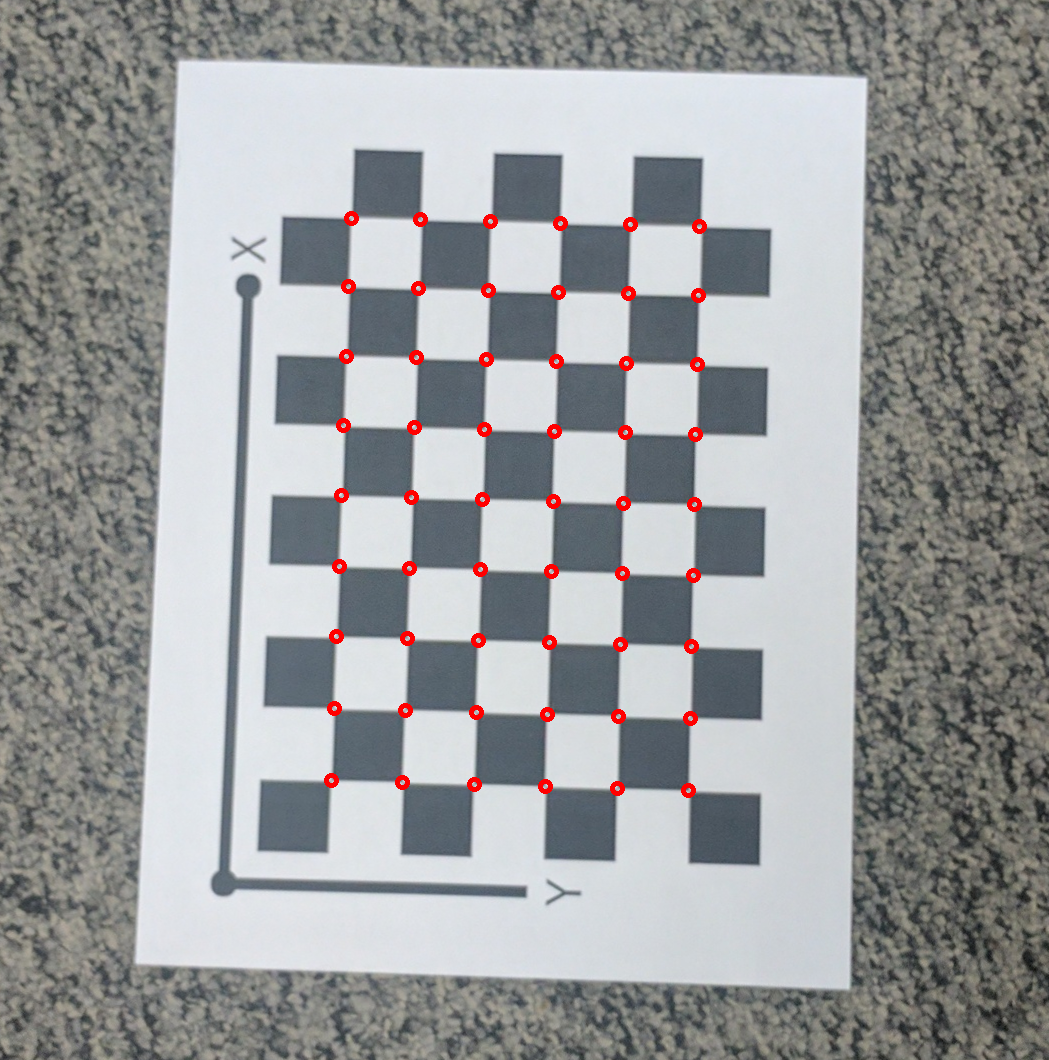
Python implementation of Structure form motion on given set of images and tiny NeRF model implementation.
Implemented various algorithms like RRT,RRT*,A*,Dikjstras,BFS,DFS and PRM algorithms.
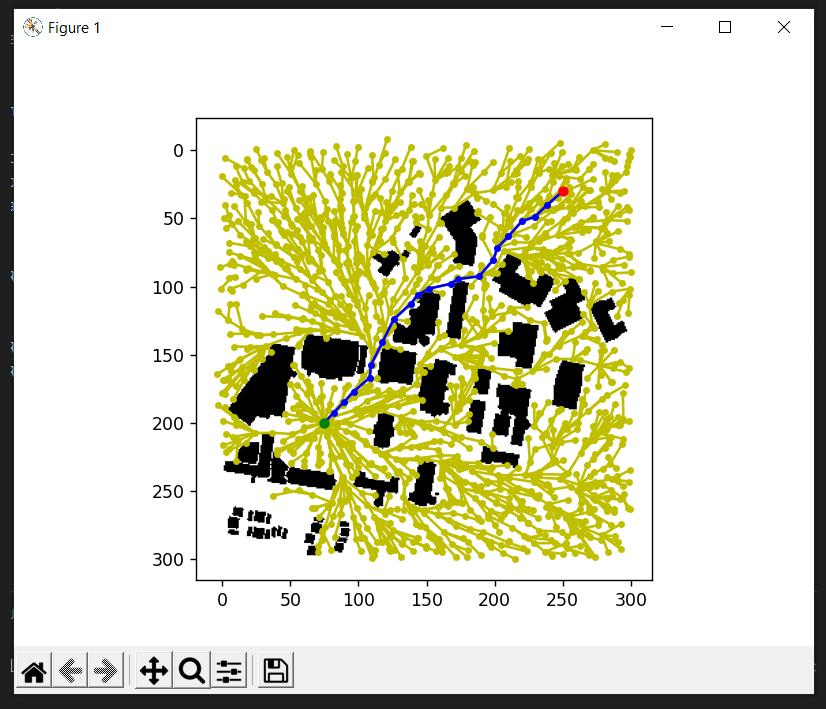
Developed a novel heuristic based A* MAPF algorithm with feasible motion primitives, which imply the non holonomic constraints.
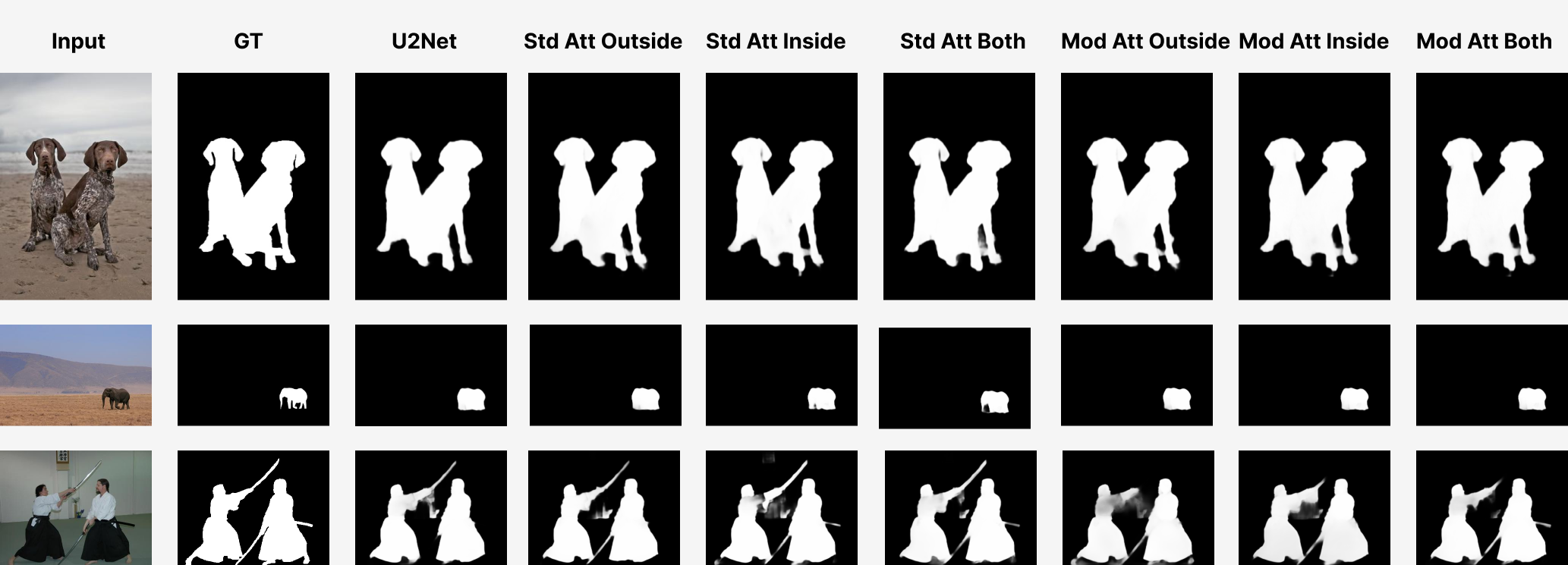
Implementation of Attenion block in U2Net architecture to enhance its performance.
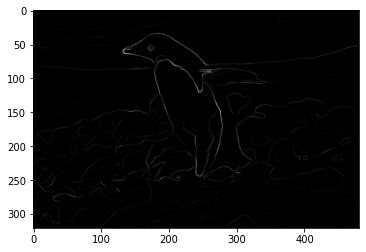
Implementation of Probability-based edge detection algorithm to detect significant edge.
Executed the commands of laptop using simple hand gestures. Implemented ultrasonic sensors, microcontroller used to
identify the hand gestures and execute the desired command on laptop.
Designed and implemented a walking trajectory algorithm for Nimbro humanoid robot for Robocup.

Custom made autonomous ground vehicle to navigate in a static indoor setup.

Contact
- avarude@wpi.edu
- 5084108476
- 9 Boynton St, Worcestor,MA, 01609