Implementation of
The objective of this project is to implement various basic motion planning algorithms and analyse there performance. BFS/DFS
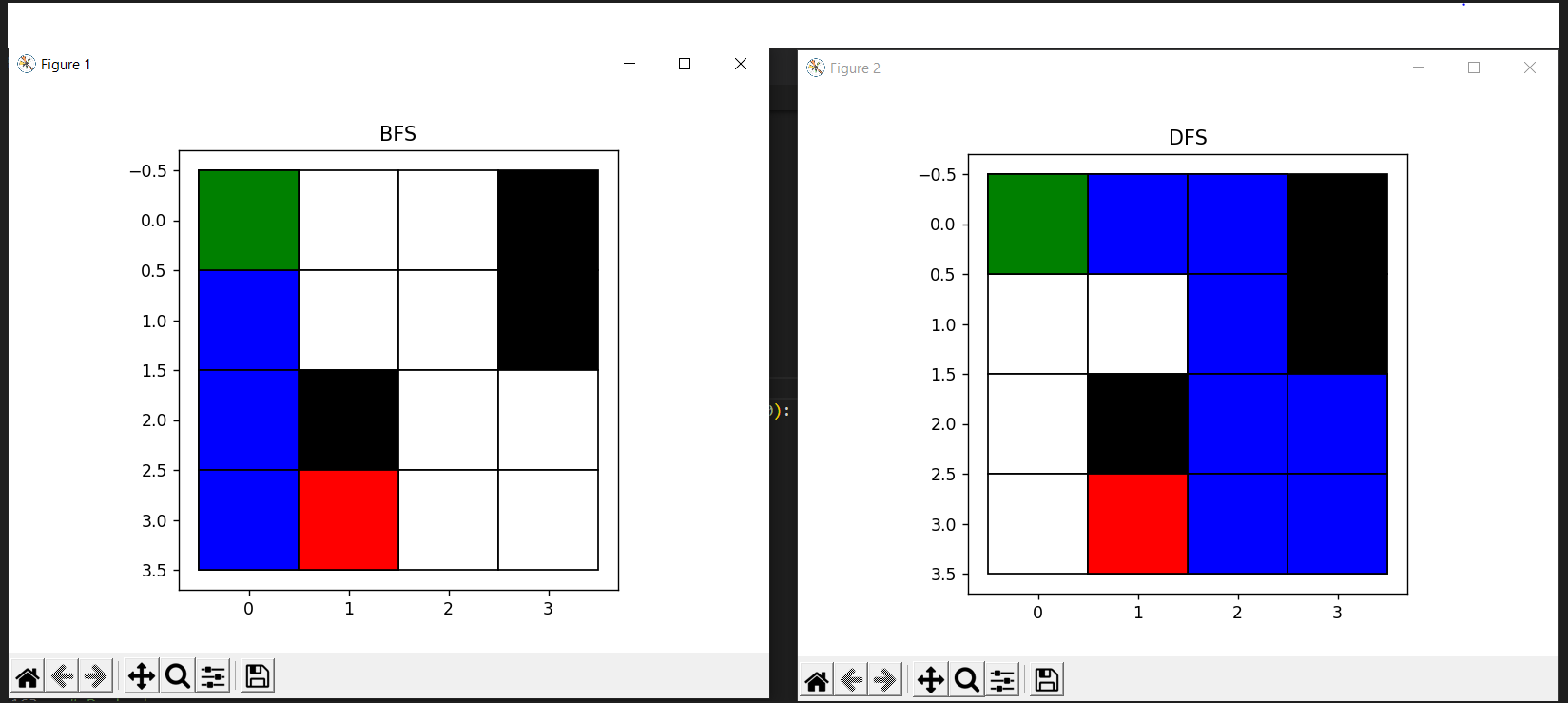
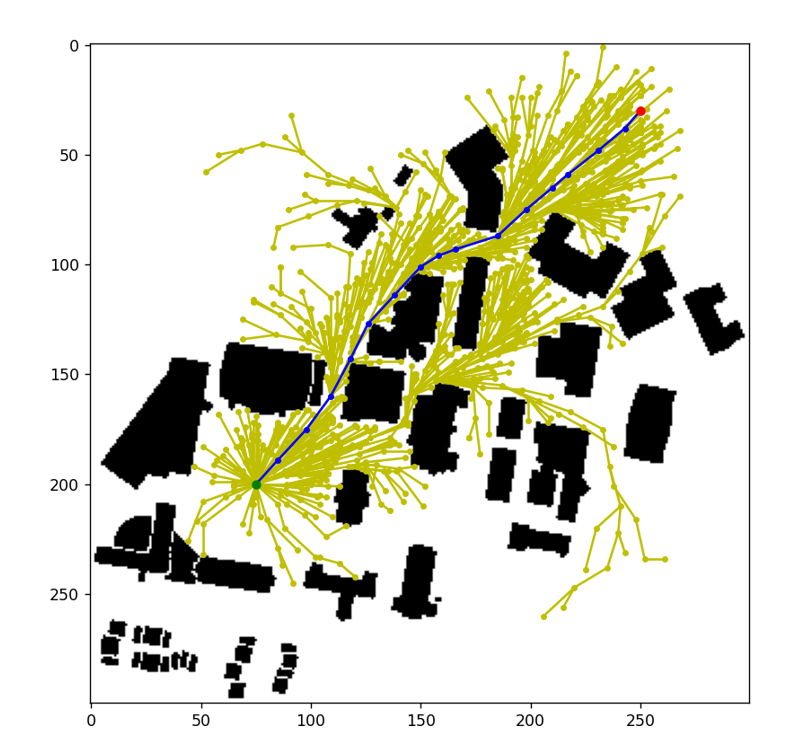
The objective of this project is to implement various basic motion planning algorithms and analyse there performance. BFS/DFS